概述:Turtlebot2i是针对turtlebot2-arm版本的软件安装包,这里简单介绍一下它的的安装与编译,根据实际情况与官方教程有所不同。本文的软件安装过程:先安装ROS-kinetic基本功能包-测试主从机ssh通信-配置Turtlebot2i软硬件。
硬件列表
Kubuki底座;sr300摄像头;astra摄像头;phantomx机械臂,工控机(这里我用了自己的笔记本代替)。 
软件列表
系统:ubuntu16 LTS(建议安装最新核的系统,本人系统核为4.13.0-32-generic,用uname -r命令查看,ubuntu14编译需要更改相关库文件以及部分lanuch文件) Ros版本:ros-kinectic
基本ROS包编译
GTK安装
1
sudo apt-get install build-essential libgtk-3-dev
安装源
1
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
添加key并更新
1
2
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
sudo apt update && sudo apt upgrade
ssh安装(用于远程控制)
1
sudo apt install vino ssh gedit
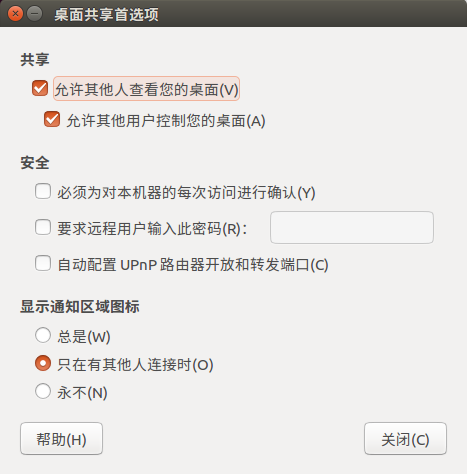
修改参数,勾选允许其他人查看您的桌面,允许其他用户控制您的桌面,取消勾选必须对本机器的每次访问进行确认:
1
vino-preferences
安装ROS-kinetic安装包
1
2
3
4
sudo apt install git build-essential ros-kinetic-desktop
sudo rosdep init
rosdep update
sudo apt install python-rosinstall
主从机控制
主从机通信
获取两台电脑的IP(假设此时从属笔记本已经连接上了主控制PC网络):
1
ifconfig
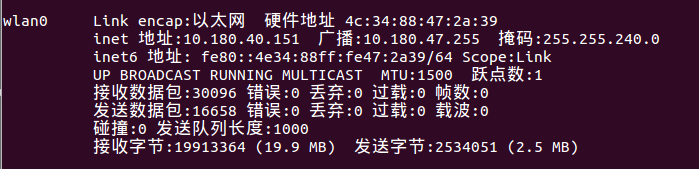 上图中的
上图中的inet的地址即为该电脑的IP(台式机连接有线的话则为eth0),得到计算机的主机名:
1
hostname
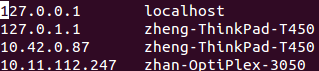
两台电脑hosts文件加入主从机的主机名和IP:
1
2
sudo chmod a+w /etc/hosts
vim /etc/hosts
 重启网络:
重启网络:
1
sudo /etc/init.d/networking restart
两台电脑需要进行同步(可能需要安装sudo apt install ntpdate):
1
2
3
4
5
6
sudo apt-get install chrony
sudo ntpdate ntp.ubuntu.com
#安装ssh:
sudo apt-get install openssh-server
#查看ssh状态:
sudo service ssh status
显示:ssh start/running, process 1271。
开始通信,台式机进行ping,连接笔记本,hostname为各自电脑的hostname:
1
2
ssh PC_hostname
ping laotop_hostname
会得到相应的信息,进行demo的测试(ROS),台式机上运行:
1
2
ssh PC_hostname
roscore
启动listener,并且设置ROS_MASTER_URI:
1
2
export ROS_MASTER_URI=http://PC_hostname:11311
rosrun rospy_tutorials talker.py
笔记本上运行:
1
2
3
ssh laptop_hostname
export ROS_MASTER_URI=http://PC_hostname:11311
rosrun rospy_tutorials listener.py
可以得到hello的信息。
主从Turtlebot控制
主机上进行.bashrc文件的修改,可以不用再需要ssh:
1
gedit ~/.bashrc
加入以下内容:
1
2
export ROS_HOSTNAME=PC_hostname
export ROS_MASTER_URI=http://PC_hostname:11311
笔记本上需要添加:
1
2
export ROS_HOSTNAME=laptop_hostname
export ROS_MASTER_URI=http://PC_hostname:11311
主机台式机上运行:
1
roscore
计算机上运行:
1
rosrun turtlesim turtlesim_node
 台式机上运行即可:
台式机上运行即可:
1
rosrun turtlesim draw_square
Turtlebot监控,在笔记本上: sh roslaunch turtlebot_bringup minimal.launch --screen 台式机上:
1
roslaunch turtlebot_teleop keyboard_teleop.launc
Turtlebot2i功能包安装
RealSense安装包安装
原教程中需要更新系统核到4.0.4.10以上,如果核的版本在此以上则无需升级,直接安装:
1
2
3
4
5
6
7
8
9
10
11
12
sudo apt install ros-kinetic-librealsense ros-kinetic-realsense-camera
#安装过程中会报错,但是貌似不影响使用。
sudo apt-get install libglfw3-dev
cd librealsense
mkdir build && cd build
cmake ../
cmake ../ -DBUILD_EXAMPLES=true
make && sudo make install
cd ..
sudo cp config/99-realsense-libusb.rules /etc/udev/rules.d/
sudo udevadm control --reload-rules && udevadm trigger
./scripts/patch-realsense-ubuntu-xenial.sh
安装结束后可以测试demo,进入~/librealsense/build/examples/capture/目录,执行:
1
./rs-capture
Turtlebot官方包安装
1
2
3
sudo apt install ros-kinetic-turtlebot* libudev-dev ros-kinetic-find-object-2d ros-kinetic-rtabmap-ros ros-kinetic-mov
eit ros-kinetic-octomap-ros ros-kinetic-manipulation-msgs ros-kinetic-controller-manager python-wxgtk3.0
Turtlebot2i包下载和编译
1
2
3
4
5
6
7
8
9
10
11
source /opt/ros/kinetic/setup.bash
cd ~
mkdir -p ~/turtlebot2i/src
cd ~/turtlebot2i/src
git clone https://github.com/Interbotix/turtlebot2i.git .
git clone https://github.com/Interbotix/arbotix_ros.git -b turtlebot2i
git clone https://github.com/Interbotix/phantomx_pincher_arm.git
git clone https://github.com/Interbotix/ros_astra_camera -b filterlibrary
git clone https://github.com/Interbotix/ros_astra_launch
cd ~/turtlebot2i
catkin_make
修改Shell环境变量
打开~/.bashrc文件,修改环境变量:
1
gedit ~/.bashrc
添加以下内容:
1
2
3
4
5
6
7
8
9
source /opt/ros/kinetic/setup.bash
source /home/用户名/turtlebot2i/devel/setup.bash
alias goros='source devel/setup.sh'
export ROS_HOSTNAME=example.hostname
export TURTLEBOT_3D_SENSOR=astra
export TURTLEBOT_3D_SENSOR2=sr300
export TURTLEBOT_BATTERY=None
export TURTLEBOT_STACKS=interbotix
export TURTLEBOT_ARM=pincher
最后source脚本文件:
1
source ~/.bashrc
建立UDEV规则
1
2
3
4
5
6
sudo usermod -a -G dialout turtlebot
cd ~/turtlebot2i/
goros
rosrun kobuki_ftdi create_udev_rules
rosrun astra_camera create_udev_rules
cd ~/turtlebot2i/src/turtlebot2i_misc
另外还需要建立机械臂端口的udev规则,这里与教程有所不同,教程中再次设定了底座的端口名,但是前面其实已经设定了,所以不需要再次设定,而且原教程的方法在我的电脑上不适用。这里介绍我自己的方法:
先打开99-turtlebot2i.rules规则文件:
1
gedit 99-turtlebot2i.rules
插入arbotix机械臂控制板(控制板需要烧录固件,并且安装驱动,参照arbotix控制板使用),查看其端口名:
1
lsusb
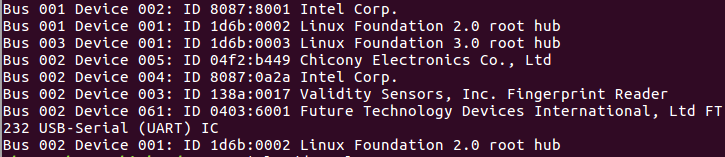 其中的
其中的FT232端口即为arbotix驱动板的端口,查看usb名:
1
ls /dev -l
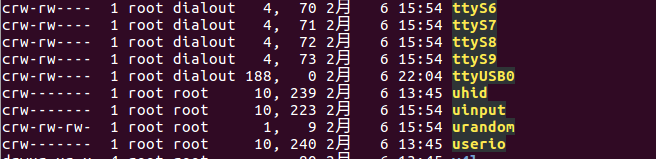 端口为
端口为ttyUSB0端口,底座端口为ttyUSB1,注意最好记录两者所插的USB口,两者端口插反的话有可能导致端口识别错误,查看ttyUSB0端口的信息:
1
udevadm info -a -p $(udevadm info -q path -n /dev/ttyUSB0)
找到对应的KERNELS(为第一个带有:的KERNELS的之后那个)2-1: 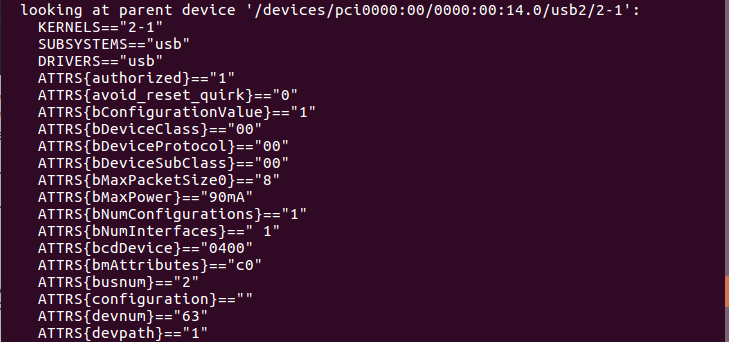 建立
建立uedv规则:KERNELS=="2-1", ATTRS{idVendor}=="0403", ATTRS{idProduct}=="6001", MODE="0777", SYMLINK+="arbotix"
复制到规则目录,重启规则:
1
2
sudo cp ./99-turtlebot2i.rules /etc/udev/rules.d/
sudo udevadm control --reload-rules && sudo service udev restart && sudo udevadm trigger
可以进行测试机械臂,连接电源,重接跳线帽,输入:
1
2
arbotix_terminal
ls
可以得到各个舵机的编号:1,2,3,4,5.....
测试demo
连接好底座,机械臂控制板(底座供电,注意usb口要保持保持一致接入),astra摄像头以及sr300摄像头。
测试demo,打开端口输入:
1
roscore
再输入:
1
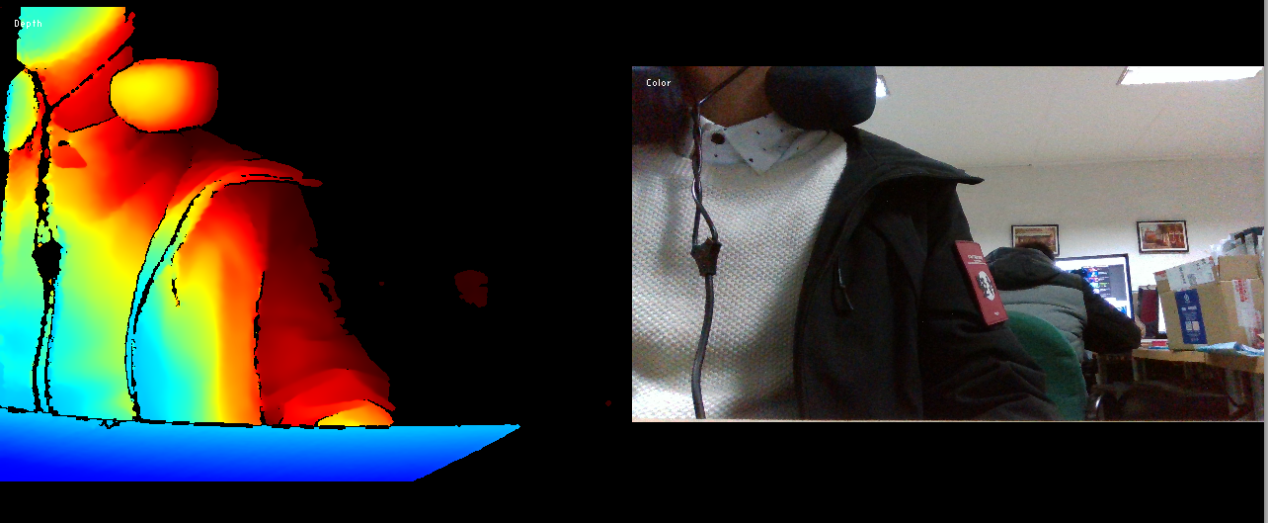
roslaunch turtlebot2i_bringup turtlebot2i_demo1.launch rviz:=true
得到: 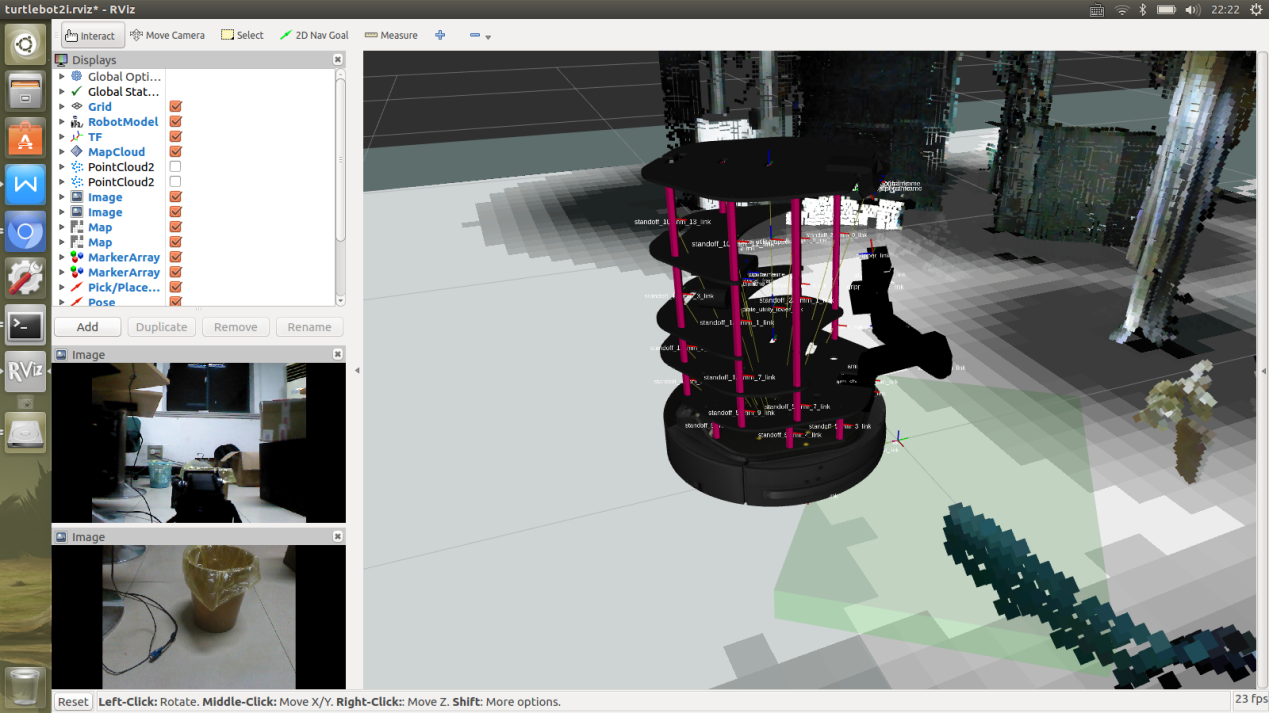
如何学习ROS
学习资料
开始学习教程 - 立刻进入和开始使用ROS开始学习教程 - 立刻进入和开始使用ROS教程
概览 - 通读ROS和它的功能的这个概览。
有关ROS架构的更多详细信息,请参考ROS核心文档 。
找答案 有三个地方去寻找你的问题的答案。第一个就是维基。请尝试右上角的“搜索”( Search)功能。如果你不能找到你的问题的解决方法,就尝试搜索官网或者邮件列表归档。或者在官方论坛上提出问题。查看支持页面获取更多信息。
找代码 查看ROS软件包这个浏览软件包的工具可以让你搜索一些有用的软件包。
你也可以通过浏览公开的ROS代码库的这个列表来寻找做相似工作的群组
如何使用这个wiki 请参考维基导航来获取更多信息。
ROS机器人操作系统官方教程说明
示例源码文件夹:/opt/row_ws/src
环境配置:rosdep install --from-paths src -iy
配置完成后:All required rosdeps installed successfully
编译功能包:在ros_ws目录下输入:
1
catkin_make -j1 -l1
如果没有遇到错误,就可以使用功能包中的教程进行实验了。在.bashrc中添加:source /opt/ros_ws/devel/setup.bash,或者使用:
1
echo "source /opt/ros_ws/devel/setup.bash" >> ~/.bashrc
测试(源码位于/opt/ros_ws/src/common_tutorials/):
1
2
3
4
roscore
rosrun turtlesim turtlesim_node
rosrun turtle_actionlib shape_server
rosrun turtle_actionlib shape_client
测试(示例源码在/opt/ros_ws/src/geometry_tutorials):
1
2
roslaunch turtle_tf2 turtle_tf2_demo.launch
rviz