概述:
系统:ubuntu14.04.5(64)+ASTRA+SR300摄像头
摄像头型号:ORBBEC Astra摄像头+RealSense SR300
ROS版本:Indigo version
Note:驱动的安装和系统版本有关系,所以务必使用支持更新的系统版本,这里使用的是ubuntu14.04.5,另外github上的程序包因为会不断更新,所以部分文件会有不同,注意版本。
ORBBEC Astra驱动安装
请在下面网址,分别下载对应包:Package1,Package2
也可以直接下载打包好的资源:安装包
首先安装驱动,依据版本选择下载驱动中合适的版本:OpenNI-Linux-x64-2.3 安装必要的头文件和库:
1
sudo apt-get install build-essential freeglut3 freeglut3-dev
检查udev版本:
1
2
3
ldconfig -p | grep libudev.so.1
cd /lib/x86_64-linux-gnu
sudo ln -s libudev.so.x.x.x libudev.so.1
安装驱动,解压缩文件:
1
2
cd OpenNI-Linux-x64-2.3
sudo sh install.sh
该操作会产生OpenNIDevEnvironment 文件:
1
source OpenNIDevEnvironment
编译示例程序:
1
2
cd Samples/SimpleViewer
make
启动示例程序之前需要设置权限:
1
sudo apt-get install libgl1-mesa-dri
运行示例程序:
1
2
cd Bin/x64-Release
./SimpleViewer
效果如下: 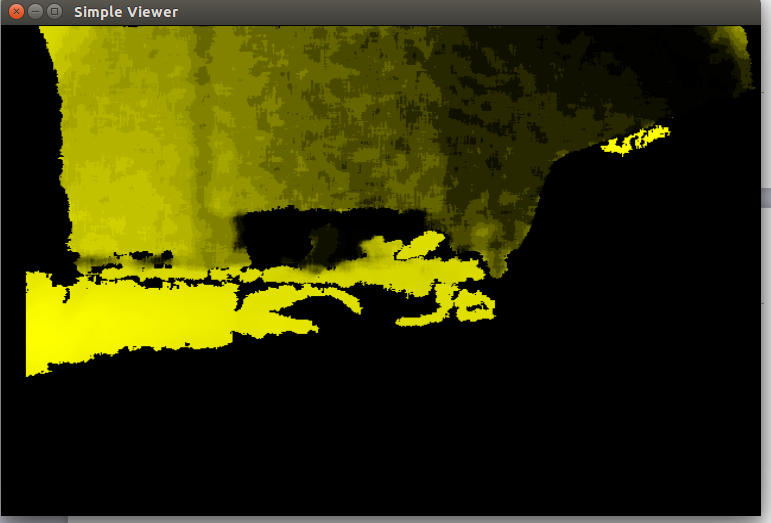
SR300驱动安装
官方驱动 这里安装在主文件夹内:
1
git clone https://github.com/IntelRealSense/librealsense
解压进入文件夹,更新系统:
1
sudo apt-get update && sudo apt-get upgrade && sudo apt-get dist-upgrade
安装依赖项:
1
sudo apt-get install libudev-dev pkg-config libgtk-3-dev
进入libsense文件夹后,执行:
1
./scripts/install_glfw3.sh
安装gcc-5:
1
2
3
4
5
sudo add-apt-repository ppa:ubuntu-toolchain-r/test
sudo apt-get update`
sudo apt-get install gcc-5 g++-5
sudo update-alternatives --install /usr/bin/gcc gcc /usr/bin/gcc-5 60 --slave /usr/bin/g++ g++ /usr/bin/g++-5
sudo update-alternatives --set gcc "/usr/bin/gcc-5
因为最新的linsense安装包的cmake文档文件需要cmake3以上的版本,所以这里先需要安装cmake3:
1
sudo apt-get install cmake3
进行源码编译:
1
2
3
4
5
6
mkdir build
cd build
cmake ..
make && sudo make install
cmake ../ -DBUILD_EXAMPLES=true
make && sudo make install
编译完成后,因为ubuntu14下软件依赖于cmake2.8,所以要卸载cmake3:
1
2
3
sudo apt-get remove cmake3
sudo apt-get remove cmake-data
sudo apt-get install cmake
安装Video4Linux(liunx下的内核驱动),拷贝文件:
1
sudo cp config/99-realsense-libusb.rules /etc/udev/rules.d/
强制使用新的udev规则:
1
sudo udevadm control --reload-rules && udevadm trigger
安装openssl:
1
sudo apt-get install libssl-dev
安装补丁模块:
1
./scripts/patch-realsense-ubuntu-xenial.sh
安装完毕之后 ,插入sr300摄像头,执行命令,会发现有驱动安装:
1
sudo dmesg | tail -n 50
进入到之前的build/examples/capture文件夹,执行demo:
1
2
cd build/examples/capture
./rs-capture'
ROS安装
- 安装
1 2 3 4 5
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' #设置密钥 sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net --recv-key 0xB01FA116 #如果上面的命令超时,则执行 sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116
- 初始化:
1 2 3
sudo apt-get install ros-indigo-desktop-full sudo rosdep init sudo rosdep update
- 环境设置:
1 2
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc source ~/.bashrc
- 安装
rosinstall:1
sudo apt-get install python-rosinstall
- 验证demo:
初始化ROS环境,全局参数,以及每个节点注册等工作:
1
roscore
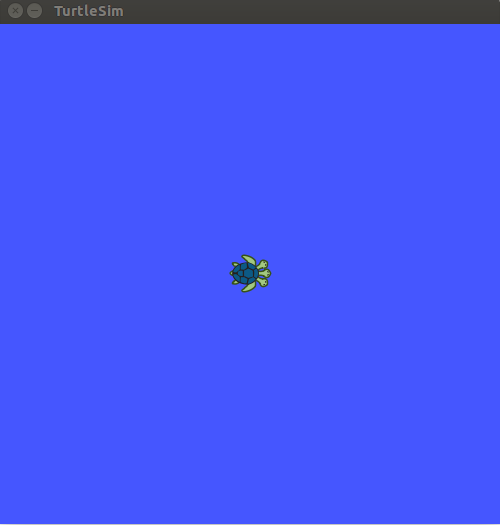
打开一个终端,开启一个小乌龟界面:
1
rosrun turtlesim turtlesim_node
 再打开一个终端,键盘控制小乌龟移动
再打开一个终端,键盘控制小乌龟移动
1
rosrun turtlesim turtle_teleop_key
再打开终端,看到Ros node图形展示
1
rosrun rqt_graph rqt_graph
ROS下使用Astra摄像头
安装astra_camera和astra_launch驱动:
1
sudo apt-get install ros-indigo-astra-camera ros-indigo-astra-launch
打开一个新终端,执行astra_launch:
1
roslaunch astra_launch astra.launch
正常的话可以通过rqt_image_view进行显示:
1
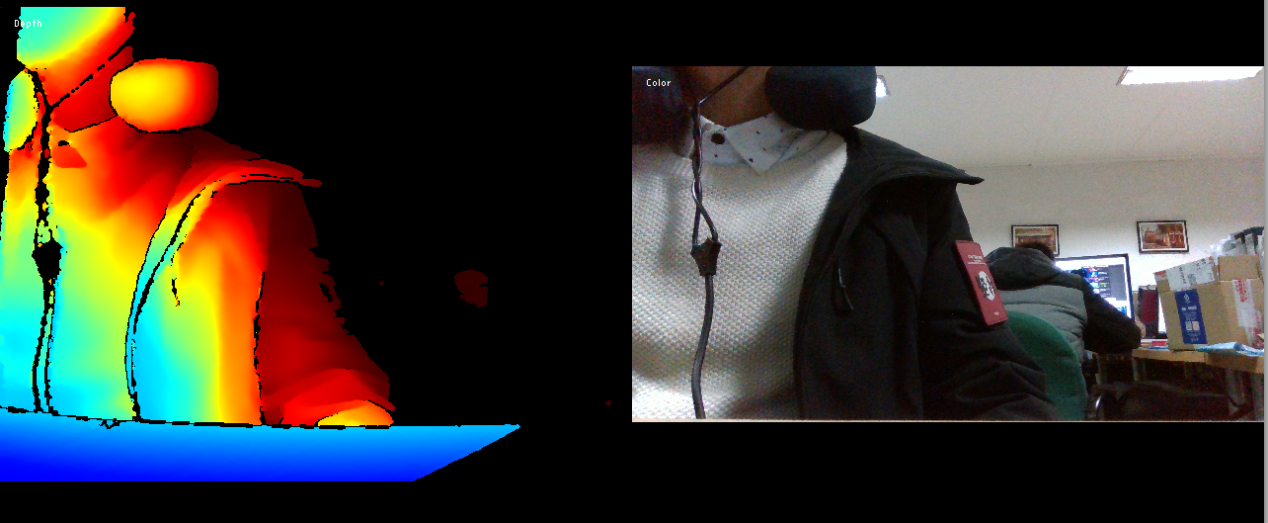
rosrun rqt_image_view rqt_image_view
可分别显示RGB图像和深度图像: 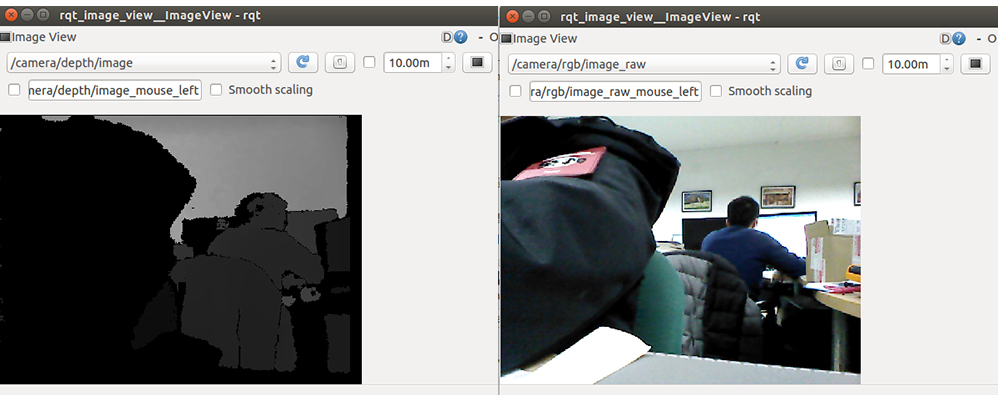 也可以采用
也可以采用rviz来进行显示:如果出现rviz显示界面全黑的情况需要强制软件渲染:
1
export LIBGL_ALWAYS_SOFTWARE=1
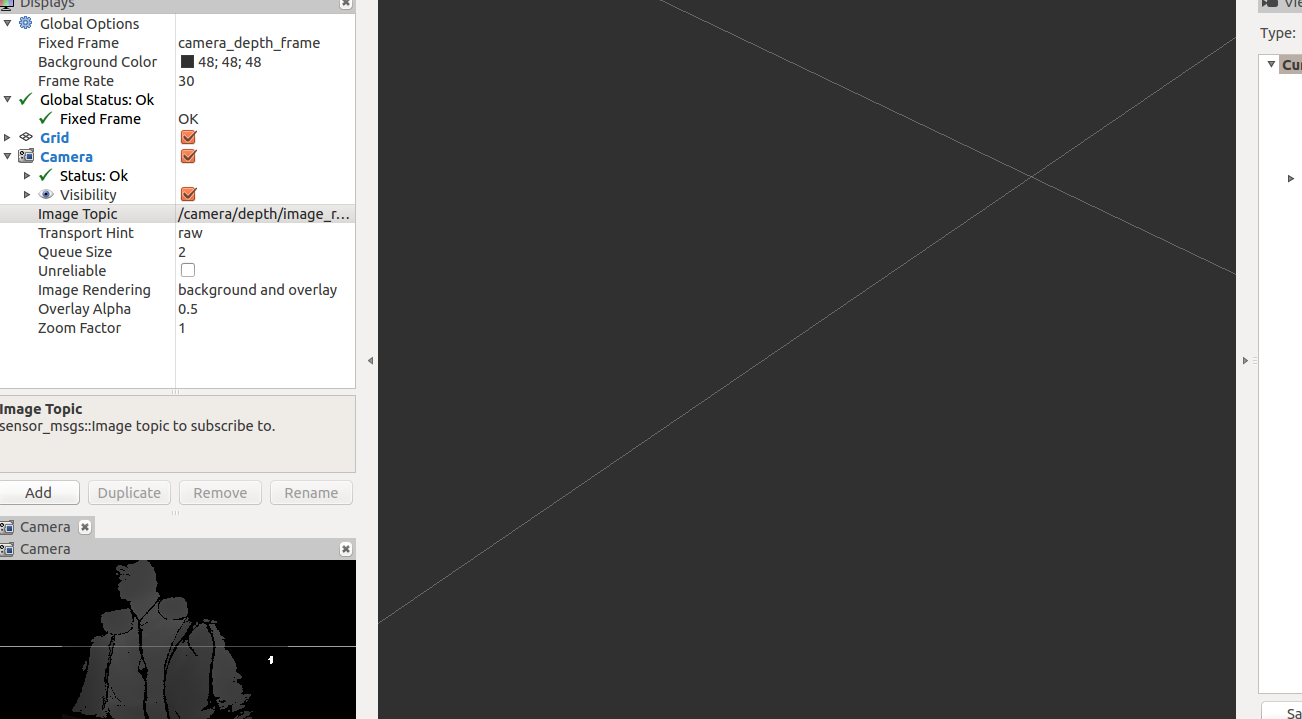
再次打开rviz:
1
rosrun rviz rviz
更改Fixed Frame为camera_rgb_frame,并Add一个camera: 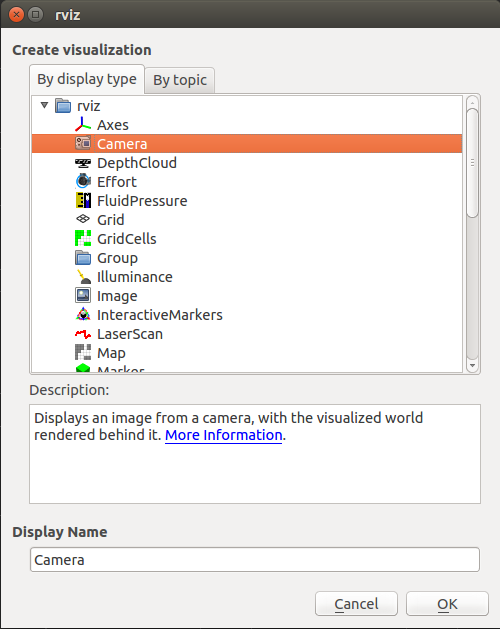 更改
更改image Topic为/camera/rgb/image_raw,即可在左下方显示rgb图像:  更改
更改Fixed Frame为mera_depth_optical_frame,并Add一个PointCloud2,更改PointCloud2中的topic图像为/camera/depth/points,得到点云图像: 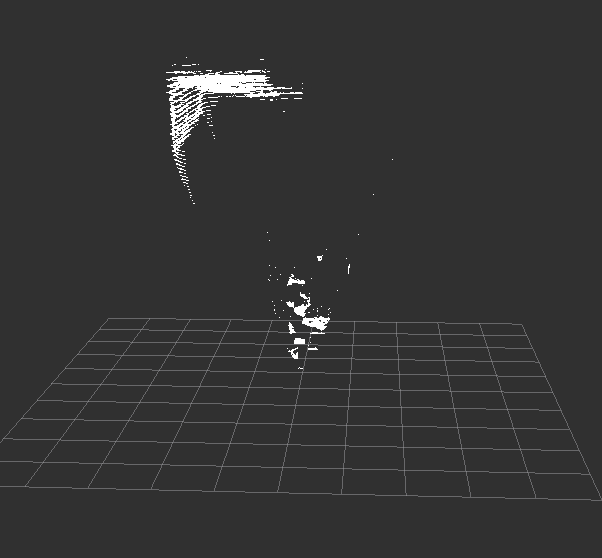
ROS下使用RealSense摄像头
Deb安装:
1
sudo apt-get install ros-kineticros-realsense-camera
源码安装:
1
2
3
4
5
6
cd /
mkdir catkin_ws/src
git clone https://github.com/intel-ros/realsense.git
cd ..
catkin_make
rospack profile
打开一个新终端:
1
2
3
roscore
roslaunch realsense_camera sr300_nodelet_rgbd.launch
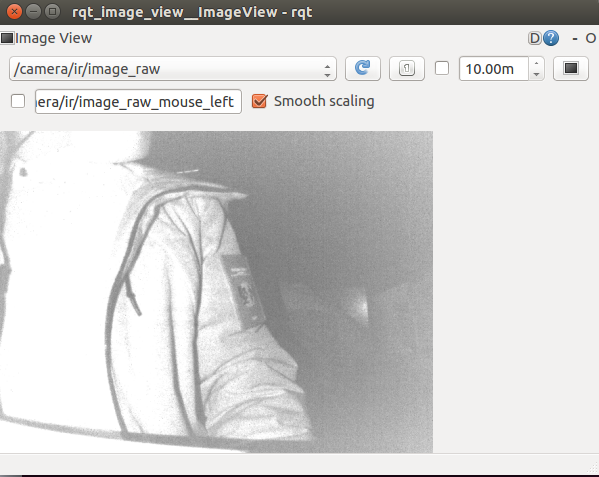
rosrun rqt_image_view rqt_image_view
Rviz下:
1
rosrun rviz rviz