目录
Multi-Task Multi-Sensor Fusion for 3D Object Detection
论文背景以及基本思想
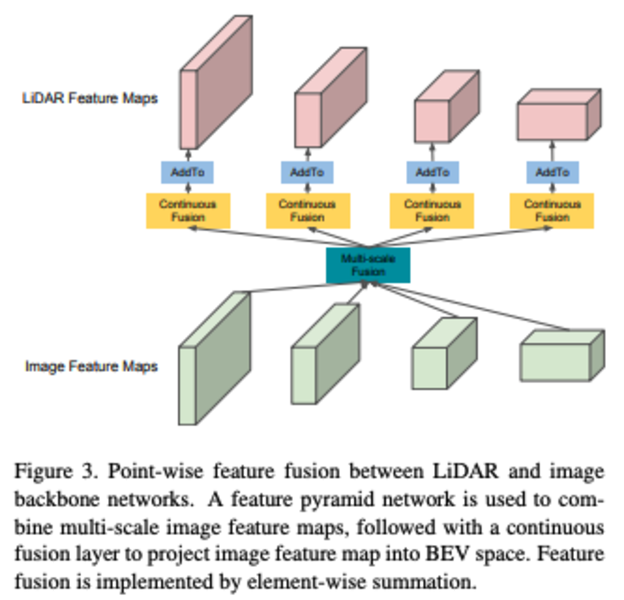
出发点:基于前作ContFuse的改进,ContFuse虽然融合了Image和Bev的信息,但是对于非常稀疏点云,效果有限。同时,ContFuse的detector head结构过于简单,
算法基本流程
- 核心:
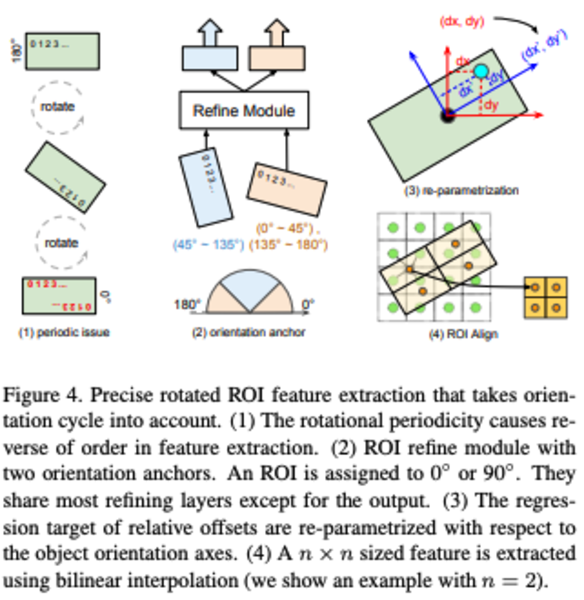
- 参考AVOD设计了基于ROI-wise fusion的detector head。
- 进行了ground plane的辅助网络:Unet结构,会预测点云Voxel Space每个Voxel的地面高度作为ground plane信息(BEV),BEV点云信息会减去对应的height信息,最后预测结果会相应加上height
- 添加depth completion分支,进行深度补全,生成pseudo lidar,会在真实点云信息缺失的时候进行补充
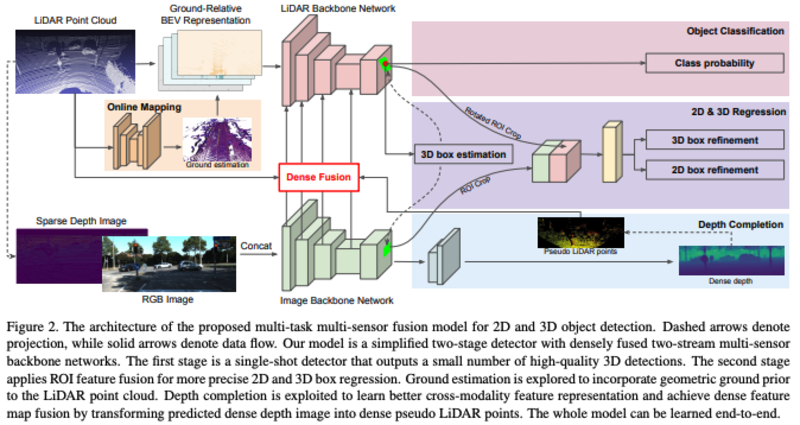
- 算法框架:

算法细节
- 关键点:
- 作者认为基于2D图片提取proposal的方案不是最佳的,且认为直接从BEV图上进行Proposal的提取更简单(大小的一致性,遮挡较少)
- Online mapping分支
- Pseudo lidar能够补充远距离lidar数据的缺失,且单纯添加depth completion分支进行multi-task的训练也是有帮助的
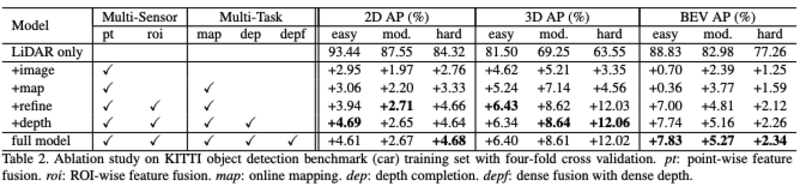
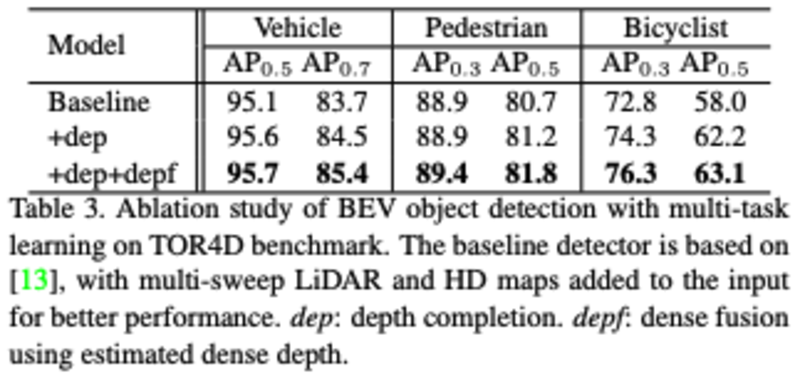
- Ablation Study:
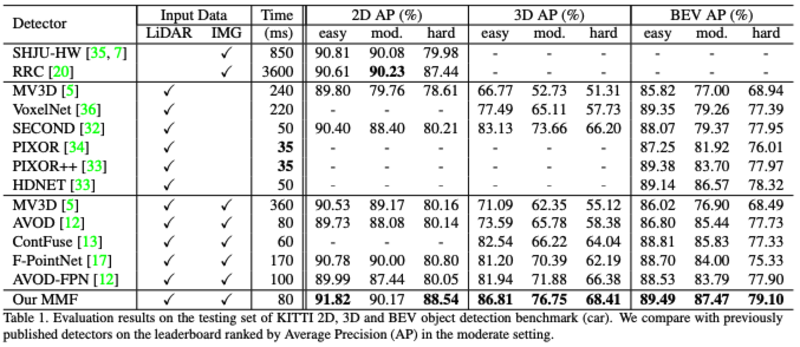
- Evaluation Results: