目录
前言
AVOD作为基于Camera信息和Lidar信息融合的3D detection算法,是目前为数不多的开源的SOTA算法之一,相关资料如下:
论文基本信息
一作信息:
Jason Ku 多伦多大学在校研究生,从事无人驾驶感知算法研究
其他相关工作:
IROS 2019
Improving 3D Object Detection for Pedestrians with Virtual Multi-View Synthesis Orientation Estimation
Kitti行人检测中排名第5 Lidar+Camera前融合方案
CVPR 2019
Monocular 3D Object Detection Leveraging Accurate Proposals and Shape Reconstruction
单目3D目标检测 KITTI当前SOTA: Car 排名112 Pedestrain 排名44 Cyclist 排名38
引用:175
通讯作者:
Steven L. Waslander 多伦多大学副教授,研究领域:Unmanned Aerial Vehicles,SLAM,Object Detection,Motion Planning
引用:4741
动机和思路
- 无人驾驶Preception当前Fusion的三种思路:
- Image based: 以
F-PointNet为代表的先用Camera做2D检测,再投影到3D空间内对视锥进行特征提取,再进行检测。特征是级联结构,性能受2D检测制约。Deep Manta,Camera预测深度,3D定位性能差。 BEV(Bird’s eye view)based: 以MV3D为代表的将点云投射在BEV上生成proposal,再通过ROI crop出Camera的相应区域做Fusion去修正预测框。特征是对高度信息运用较少,可能损失了一部分3D信息。- 3D based: 直接在3D空间中做融合,因为这个方向上融合比较困难,所以目前相关文章较少。特征是相对计算量较大。
- Image based: 以
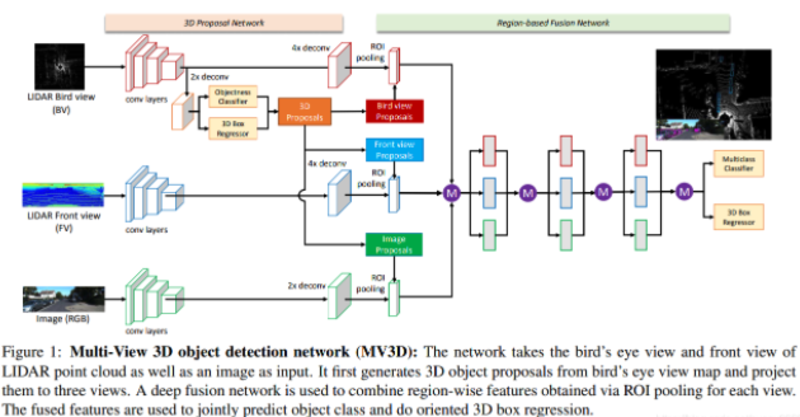
BEVbased代表作—MV3D:MV3D的基本思路是先通过BEV视角下得到3D Proposal,然后分别投影到FV视角和camera视角得到各自图像上的ROI然后进行三类feature的融合,最后在融合的feature上进行最终Box的分类和回归操作。
- 不足之处:
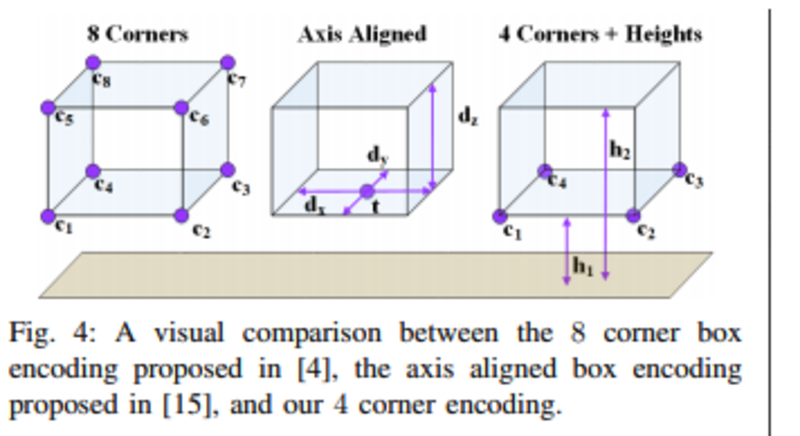
backbone特征提取的过程中,下采样会导致小物体的信息不可获取:比如行人在BEV图上为8\*6pixel,经过三次downsampling后,pixel<1,信息丢失,所以小物体检测不好- 采用的八个顶点
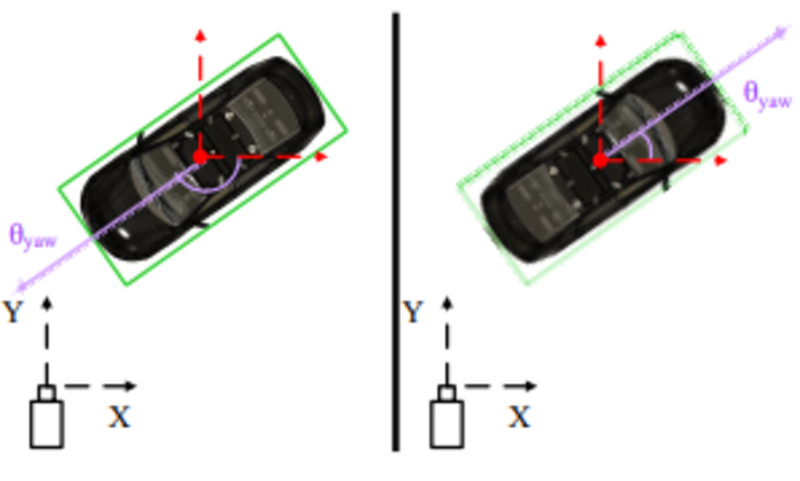
Encoding方式,缺少长方体的Constraint,未具体说明orientation的回归,(AVOD中提到MV3D采用的方向判定为与长方体平面的长边方向一致),容易上下颠倒:
算法基本流程
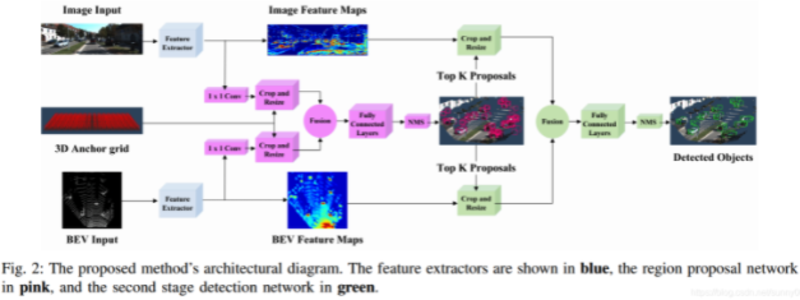
流程图:
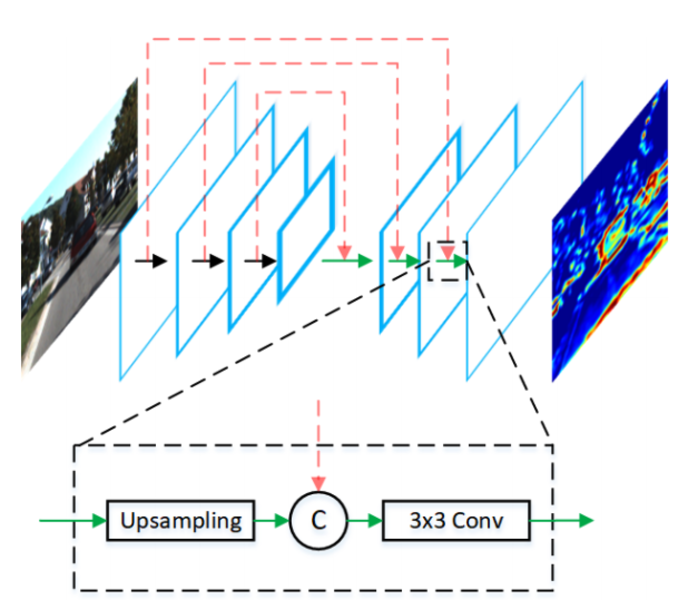
- 主要改进:
feature extractor借鉴FPN结构,融合浅层和深层feature,形成high-resolution feature mapcrop and resize:将生成的3D proposal投影到各自plane后通过bilinearly resized到n\*n feature map:- 采用约束的
box coding方式:缩小了参数维度:24d->10d,回归了平面旋转向量:
- 其他细节:
BEV为6维feature:5 heights(5 equal slices on Z axis)+density information1\*1Conv:RPN网络输出anchors数量很多,输出feature map维度过高,需要大量显存,通过1X1网络进行降维3D Proposal Generatiuon:background box不作为regression的loss计算。car的iou阈值略高于其他两类(0.5→0.45)。NMS阈值为0.8。Training proposal数目1024,Infereance 300Second Stage Detection Network:取与回归得到向量最接近的向量为orientation(预先选定了4个方向,根据corner位置)
具体实验分析
- 评价指标:
3D AP:3D IOU:摄像机坐标系下两3d长方体相交的体积占两长方体总体积的比例BEV AP:2D IOU:摄像机坐标系下的物体投影到地面上的overlap,即bird eye view下两box交集占两box总面积比例AHS(Average Heading Similarity):3D IOU and global orientation angle
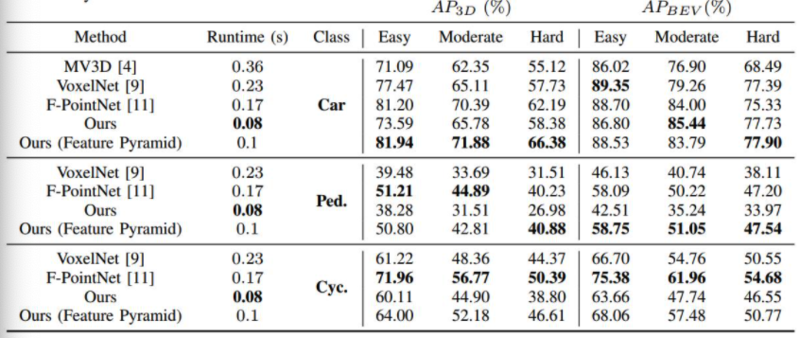
KITTI:测试集性能(无法复现)上看,AVOD在Cyclist性能略差于F-PointNet,Pedestrian各有胜负,car性能更好,但是速度更快:
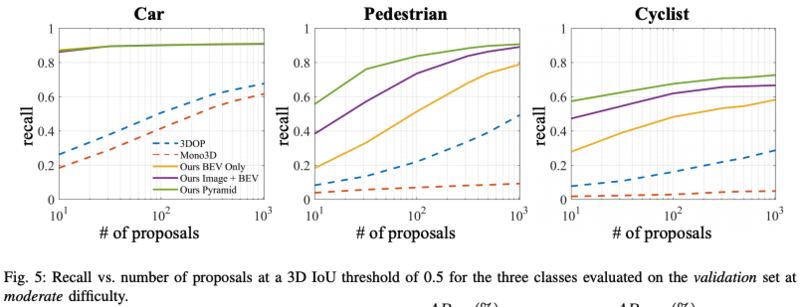
RPN Recall:验证集性能,RPN Recall高于其他同类算法,对于car一类提升不明显,可能因为本身car尺寸大,特征也比较比较明显,性能本身处于一个较高的level。另外MV3D没有对照数据:
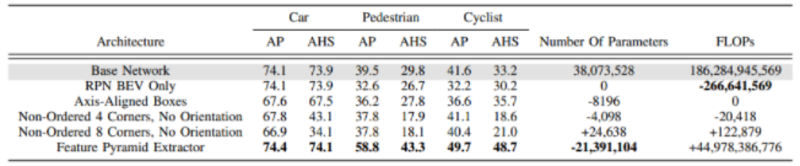
AHS:验证集性能(3D AP),朝向性能明显更好:Ablation Study(消融实验):Base Network为参照网络:采用vgg-net作为backbone的VOD网络。验证集性能(3D AP),BEV Image融合和Feature Pyramid Extractor在car类上提升不明显,在Pedestrian和Cyclist上提升明显。但是这一点在复现过程中由于只能利用train-split集的小样本(Pedestrian和Cyclist本身数目不足)以及path drop的使用,可能会导致抖动较大,论文中也提到目前没有论文公开在验证集上的Pedestrian和Cyclist类的性能。
个人总结
- 优点:相对于前作MV3D,做得更加精细,主要体现在:
FPN多层特征的融合3D Box orientation的回归策略Crop and Resize的采用
- 不足之处:
- plane平面的提取(用于生成BEV图),性能依赖于点云的密集成都
- 生成Proposal的过程中Image和Lidar数据是分离的,基于
ROI Fusion已处于高层feature的fusion,参考MMF(Multi-Task Multi-Sensor Fusion for 3D Object Detection)实现了roi-wise和point-wise上的fusion,性能更好(代码未开源) ROI-Fusion的过程中存在Image feature和BEV feature不对齐的问题- 基于BEV视图下能够得到第一阶段较高的Recall,但是后期3D位置的refinement,通过原始3d的点云信息更准确(但是要解决原始点云数据稀疏分布的问题,如通过采样,聚类等方式实现key area的融合)